

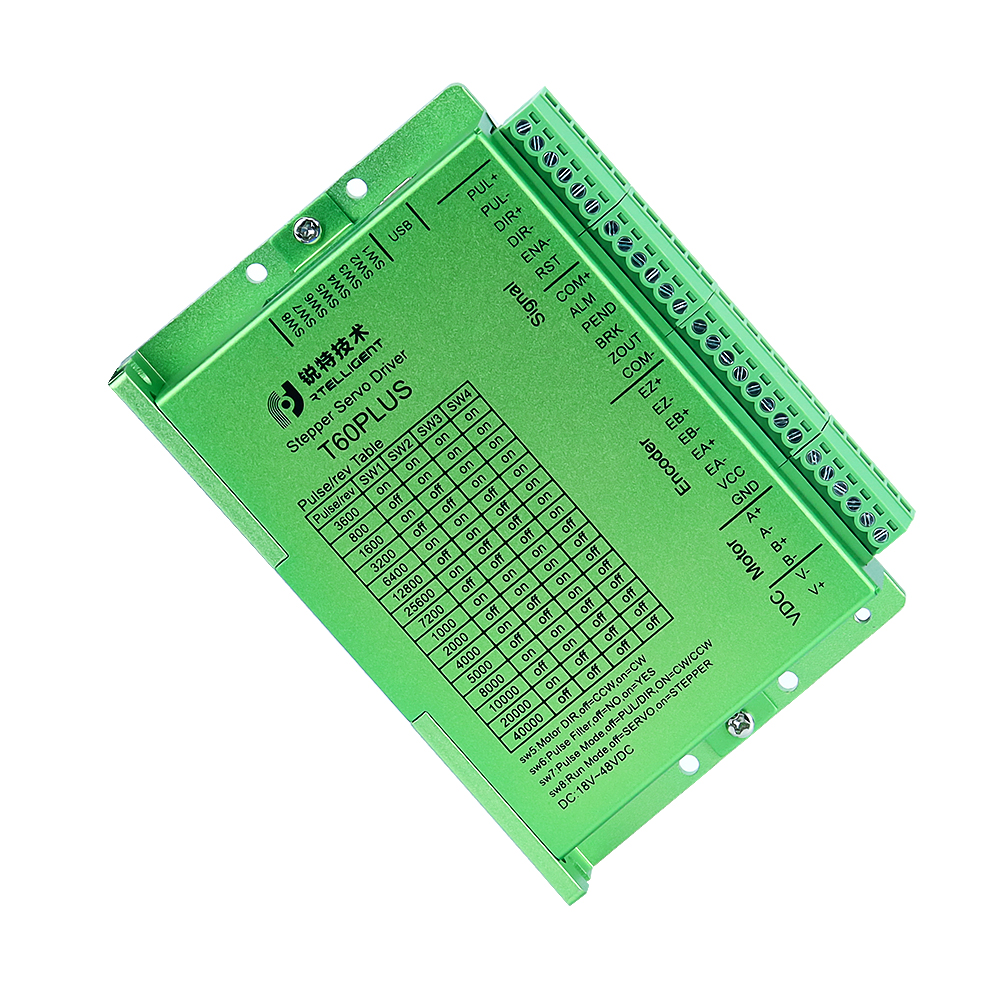


Pulskontroll 2-fase lukket sløyfe stepperdriver T60Plus


Produktintroduksjon



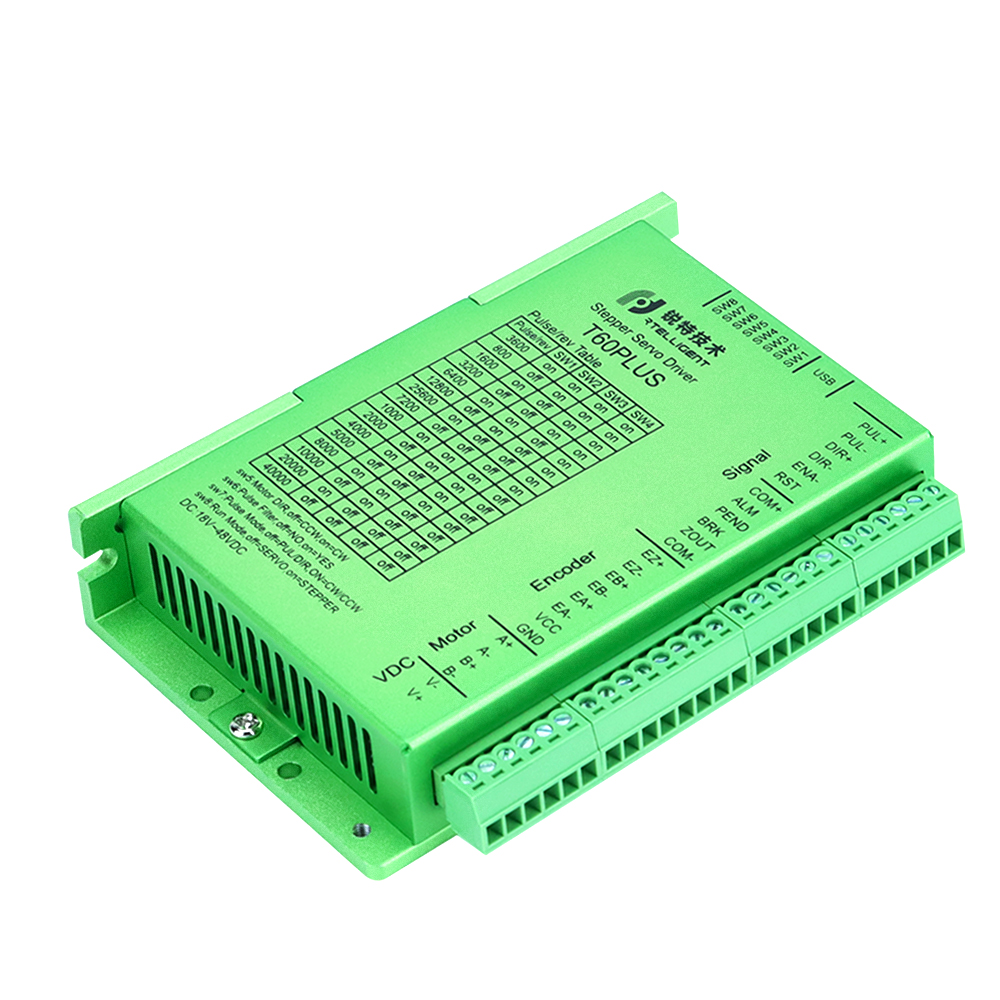
Forbindelse

Funksjoner
| Strømforsyning | 18~48VDC |
| Kontrollpresisjon | 4000 pulser/rpm |
| Pulsmodus | Retning og puls, CW/CCW dobbelpuls, A/B kvadraturpuls |
| Gjeldende kontroll | Servovektorkontrollalgoritme |
| Innstilling for underavdeling | DIP-bryterinnstilling, 15 alternativer (eller feilsøkingsprogramvareinnstilling) |
| Hastighetsområde | Konvensjonell 1200~1500 o/min, opptil 4000 o/min |
| Resonansundertrykkelse | Automatisk beregning av resonanspunkt for å undertrykke vibrasjoner i mellomfrekvens |
| PID-parameterjustering | Feilsøkingsprogramvare for å justere motorens PID-karakteristikker |
| Pulsfilter | 2MHz digitalt signalfilter |
| Alarmutgang | Alarmutgang for overstrøm, overspenning, posisjonsfeil osv. |
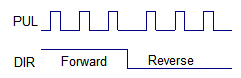
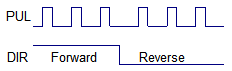
Pulsmodus
Signalgrensesnittet til standard T-serie-drivere er pulsformet, og T60PLUS V3.0 kan motta tre typer pulskommandosignaler.
| Puls og retning (PUL + DIR) |
|
| Dobbel puls (medurs + moturs) |
|
| Ortogonal puls (A/B ortogonal puls) | 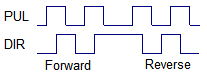 |
Mikrosteppingsinnstilling
| Puls/omdreining | SW1 | SW2 | SW3 | SW4 | Merknader |
| 3600 | on | on | on | on | DIP-bryteren settes til «3600»-tilstand, og testprogramvaren kan fritt endre andre underinndelinger. |
| 800 | av | on | on | on | |
| 1600 | on | av | on | on | |
| 3200 | av | av | on | on | |
| 6400 | on | on | av | on | |
| 12800 | av | on | av | on | |
| 25600 | on | av | av | on | |
| 7200 | av | av | av | on | |
| 1000 | on | on | on | av | |
| 2000 | av | on | on | av | |
| 4000 | on | av | on | av | |
| 5000 | av | av | on | av | |
| 8000 | on | on | av | av | |
| 10000 | av | on | av | av | |
| 20000 | on | av | av | av | |
| 40000 | av | av | av | av |
Mikrosteppingsinnstilling
Er drivterminalene utbrent?
1. Hvis det er kortslutning mellom terminalene, sjekk om motorviklingen er kortsluttet.
2. Hvis den indre motstanden mellom terminalene er for stor, vennligst sjekk.
3. Hvis det tilføres for mye lodding til forbindelsen mellom ledningene for å danne en loddekule.
Har en lukket sløyfe-stepper-driver alarm?
1. Hvis det er en tilkoblingsfeil for giverkabling, må du sørge for å bruke riktig forlengelseskabel til giveren, eller kontakte Rtelligent hvis du ikke kan bruke en forlengelseskabel av andre årsaker.
2. Sjekk om koderen er skadet, for eksempel signalutgangen.
-
 Rtelligent T60PLUS V3.0 brukerhåndbok
Rtelligent T60PLUS V3.0 brukerhåndbok




